Edge Detection
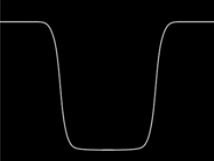
An edge is a place of rapid change in the image intensity f function.
The gradient points in the direction of most rapid increase in intensity f.
The gradient of an image: \(\nabla_{x,y}{f} = [G_{x}, G_{y}]\) where \(G_{x} = \frac{\partial{f}}{\partial{x}}, G_{y} = \frac{\partial{f}}{\partial{y}}\) - partial derivitives of f wrt x and y.


The gradient direction is given by: \(\theta = \tan^{-1} \left(\frac{G_{y}}{G_{x}}\right)\).
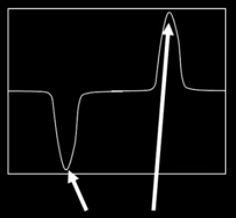
The amount of change is given by the gradient magnitude (how rapidly the fanction is changing): \(\mid \nabla_{x,y}{f} \mid = \sqrt {(G_{x}^{2} + G_{y}^{2})}\)
For discrete data the dirivative is (finite defference): \(\frac{\partial{f(x,y)}}{\partial{x}} ~ \frac{f(x+1, y) - f(x,y)}{1} = f(x+1, y) - f(x,y)\)
Magnitude of the gradient looks like edge!
Sobel Operator
and \(\nabla_{x,y}{I} = [G_{x}, G_{y}]\)
Real images have some noise and computing gradient won’t help finding eges.
So first of all we need to use a low-pass filter h to get rid of the noise and after that calculate the gradient.
h * f - filtered image
d(h * f)/dx = (dh/dx) * f
We can precompute the derivitive of h and convole it with the original image (with noise). This save us one operation.
Canny Edge Operator
Primary edge detection steps:
- Smooth derivatives to suppress noise and compute gradient (take a 2nd derivatives of low-pass filter g and convolve the result with the image).
- Threshold the result to fing regions of “significant” gradient.
- “Thin” to get localized edge pixel (
NMS) - look at a thick edge and pick only one pixel with max intensity along the gradient direction.
With bigger sigma more small variations are smoothed away. So small value of sigma allows to detect fine features, big value suitable for detecting large scale edges.
Laplasian Based on the 2nd derivatives, more sensitive to noise.