Line Detection / Hough Algorithm
Hough Transform / Line fitting
Use Voting, a general technique where we let the features vote for all models that are compatible with it.
- Cycle through features (edge points), each casting votes for model parameters.
- Look for model parameters that receive a lot of votes.
Noise also will vote, but its votes typically are inconsistent with majority of good features.
Even if some parts of a line are missing (after thresholding edge pixels) we still be able to fit the line.
Hough Transform
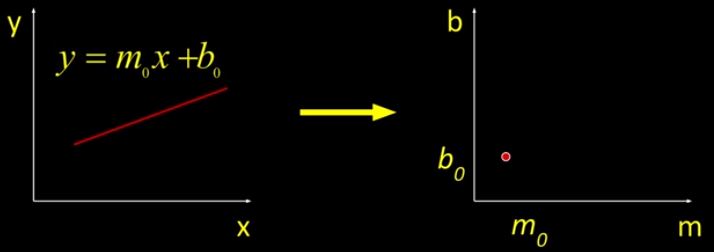
The line y = m0 * x + b0 is parameterized by m0, b0.
A line in the image corresponds to a point in Hough space (m0, b0).
Suppose we have a point (x0, y0) in the image. Then a line that goes through this point is: y0 = m * x0 + b, where m,b - some parameters.
Then in Hough space this point will correspond to a line: b = -x0 * m + y0
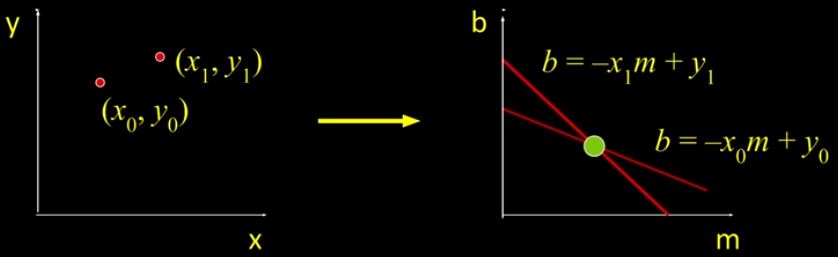
A point in the image corresponds to a line in Hough space.
A line that fits both points will be parameterized by m and b where corresponding lines in Hough space intersect.
There is an issue with vertical lines - it’s slope (m) is inf. Use Polar representation of lines.
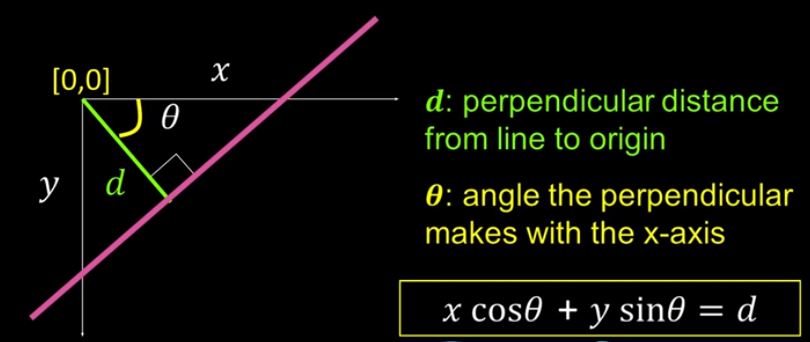
A line in polar coordinates is defined by two parameters: d and Q.
Point in image space is a sinusoid segment in Hough space.
Hough Algorithm
Devide Hough space in bins (d and Q will take values in some range, say d = [-100, 100], Q = [0, 180])
For each edge point get a line in Hough space, their intersections will vote for line parameters m, b.
Accumulate votes in discrete set of bins; parameters with the most votes indicate line in image space.
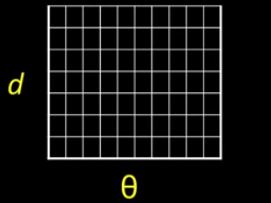

So use the polar parameterization and a Hough accumulator array H(Q,d). We can choose size of bins (1degree then number of bins = 180 of 10degree then number of bins = 18).
Basic Alg:
1. Initialize H[d; Q] = 0
2. For each edge point E(x, y) in the image
for Q = 0 to 180 // here we can set Step
d = xcosQ - ysinQ
H[d, Q] += 1
3. Find the values of (d, Q) where H[d, Q] is maximum
4. The detected line in the image is given by d=xcosQ - ysinQ
where d is index corresponding to some bin.
Space complexity
k^n - number of bins, where n - dimension (or number of parameters, in case of line it’s 2) k - bins each.
For lines k^2
Time complexity (in terms of number of voting elements): number of edge points.
Noise in real images affect result in Houph space - the peack is not so precise, and if very fine bins are used, the we may even lost it. In this case one approach can be used: blur Hough space, so we can find a pick (maybe a litle shifted).
Extensions to the basic algorithm:
- Use the gradient for Q - reduce the number of bins Q, just one value
- Give more votes for stronger edges
- Change the sampling of(d, Q) to give more/less resolution. Big bins make the alg faster, but similar lines can land in the same bin. Too fine bins make the alg to be easy affected by noise.
3.1 First, start with corse bins
3.2 Find peaks
3.3 Use more fine bins for some area around the peak to improve the model.