Udacity Self-Driving Car Project #1: Finding Lane Lines on the Road
Overview
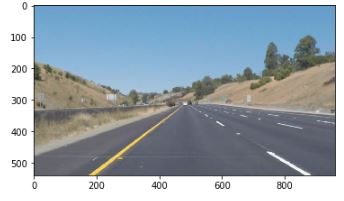
When we drive, we use our eyes to decide where to go. The lines on the road that show us where the lanes are act as our constant reference for where to steer the vehicle. Naturally, one of the first things we would like to do in developing a self-driving car is to automatically detect lane lines using an algorithm.
In this project I will detect lane lines in images using Python and OpenCV. OpenCV means “Open-Source Computer Vision”, which is a package that has many useful tools for analyzing images.
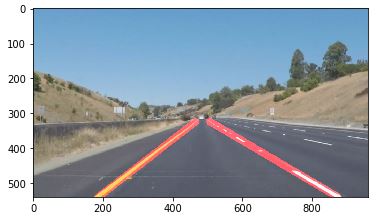
Final result on the Challenge video:
According to the results the preprocessing stage is very important for more accurate lane line detection.
Code is here.
Writeup
The first task of the Self-Driving Car course is to create a simple lane line detector. The implemented script works with video only
1. Pipeline
- load an image
- preprocessing in HSL color space - IMPORTANT - really helps in the ‘challenge’ video case
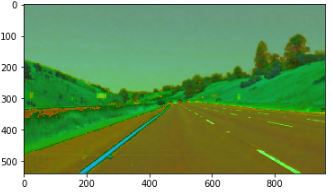
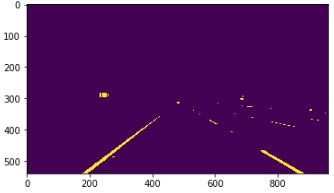
Extract white and yellow lines with corresponding masks:
Combine extracted images:
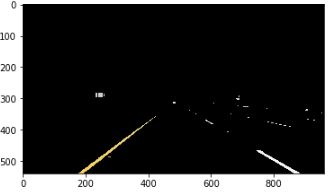
Apply this mask to the input image to extract parts of it:
- convert the result of the previous stage into a gray scale
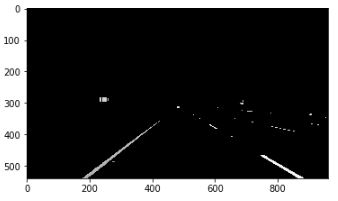
- perform filtering with the Gaussian filter
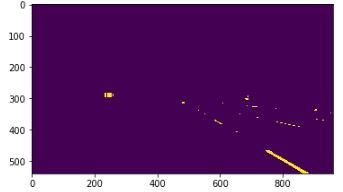
- find edges with the Canny edge detector
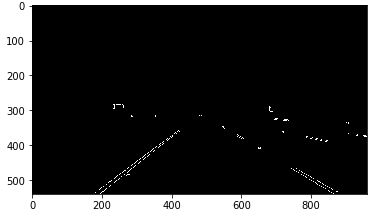
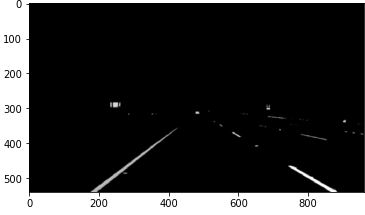
- define a region of interest (a region where we’ll look for lane lines)
- find lines from the edge points with the Hough algorithm
Hough algorithm returns an array of points: x1 y1 x2 y2. In my case I get 9 lines:
[[[227 513 424 359]]
[[213 512 374 391]]
[[550 347 838 513]]
[[529 338 821 513]]
[[379 389 421 357]]
[[292 461 407 371]]
[[373 393 405 368]]
[[585 368 747 465]]
[[529 340 746 465]]]
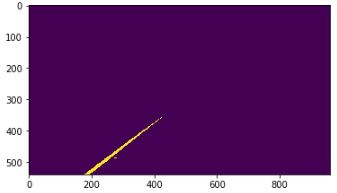
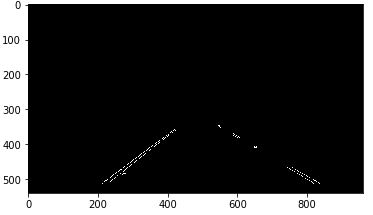
- separate found lines on left and right lines, calculate an average left/right lines
To do so calculate slope of every line, if a slope is negative - it is a left line, if positive - right. Average left/right lines:
left line: ((186, 540), (466, 324)) right_line: ((874, 540), (506, 324))
- draw lane lines
Usage: python pipeline.py test_videos\solidYellowLeft.mp4
2. Identify any shortcomings
Current implementation suffers to accurately identify curved lane lines.
3. Suggest possible improvements
-
One possible way to improve accuracy of lane line detection is to apply extraction masks (white, yellow) to the input image - Done. This method really helps, detector more accurately finds lines.
-
To increase accuracy of curved line detection try to apply some different methods for outlier lane line rejection.